El detector de fallas está destinado para la detección de los defectos en el camino de rodamiento de ambos rieles y en el perfil del riel, excepto los flancos del patín. Se usa el carretón de detección de fallas para la inspección continua y los convertidores manuales para la inspección de confirmación de ciertos segmentos de los rieles y de las juntas soldadas.
Ventajas del detector de fallas
- sondeo completo del riel (excepto los flancos del patín del riel) debido a la naturaleza multicanal del detector de fallas;
- ajustes estándares incorporados del funcionamiento de los canales;
- determinación de la distancia recorrida y de la velocidad de movimiento durante la inspección continua;
- visualización en la pantalla de los resultados de la inspección en tiempo real en modo de B-Scan (para 4 canales);
- sondeo y almacenamiento de información a través de cada milímetro de la distancia recorrida por todos los canales;
- registro de los resultados de inspección a diferentes niveles de sensibilidad;
- registro de todos los resultados de inspección y las posibilidades avanzadas del análisis de datos;
- aplicación del esquema de sondeo básico permite identificar todo tipo de defectos peligrosos que surgen durante la operación del ferrocarril.
Características distintivas del detector de fallas
- gran pantalla TFT de alto contraste en color;
- sincronización según el sensor de vía (encoder);
- formas de visualización de información: A-scan, B-scan;
- cantidad de los canales para el control continuo: 28;
- cantidad de los canales para la inspección manual: 3;
- métodos y zonas de inspección de la cabeza del riel:
- método de eco con el transductor inclinado para la inspección de la cara activa e inactiva de la cabeza del riel a lo largo y contra la dirección del movimiento;
- método de eco con el transductor inclinado para la inspección de la parte central de la cabeza a lo largo y contra la dirección del movimiento;
- método de espejo con el transductor inclinado para la inspección de la parte central a lo largo y contra la dirección del movimiento;
- método de espejo para la inspección de la parte activa e inactiva a lo largo y contra la dirección del movimiento.
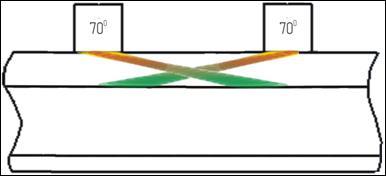
Fig. Métodos de eco de inspección de la cabeza del riel
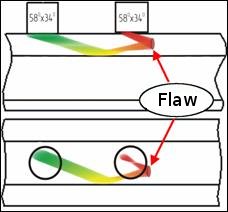
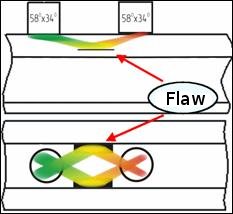
Fig. Métodos de espejo de inspección de la cabeza del riel
- métodos y zonas de inspección del alma y sus proyecciones en la base del riel:
- métodos de eco y de espejo-sombra con el transductor combinado directo para la detección de las grietas horizontales longitudinales;
- método de eco con el transductor inclinado a lo largo y contra la dirección del movimiento para la detección de las grietas transversales e inspección de los agujeros de pernos;
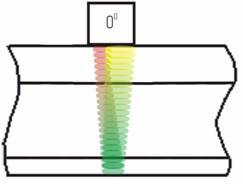
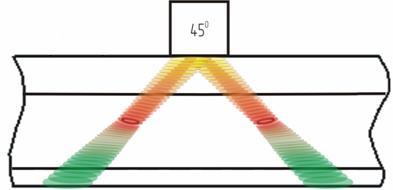
Fig. Métodos de eco de inspección del alma y de la base del riel
Cuando se utilizan los esquemas de sondeo estándar (básicos), se detectan todos los tipos de defectos inadmisibles con tales parámetros:
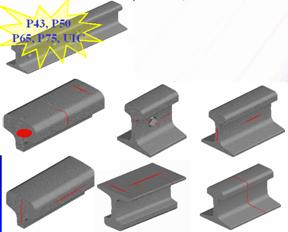

Fig. - Tipos de los rieles con defectos agudos
- grietas transversales en la cabeza del riel del segundo grupo, incluidas las grietas transversales fuertemente desarrolladas con una superficie de espejo, así como desarrolladas bajo las delaminaciones horizontales de la superficie del camino de rodamiento, no detectadas por el método de eco habitual;
- grietas horizontales longitudinales en el cuello, incluso si en su desarrollo estas no alcanzaron el eje del riel, así como en la cabeza, incluso aquellas que no salen en la proyección del cuello;
- grietas horizontales longitudinales ubicadas en el medio de la altura del riel;
- grietas de agujeros de pernos, incluso en una etapa temprana de desarrollo, cuando no van más allá de la proyección del agujero de perno en la superficie del camino de rodamiento;
- grietas verticales en la base y el alma del riel, ubicadas principalmente a lo largo del eje de los rieles;
- grietas de corrosión transversales en la base del riel ubicadas en la zona de proyección del alma.
Funciones de servicio del instrumento

- la presencia de alarmas acústicas y visuales, conmutación de los modos utilizando las "teclas de acceso rápido";
- registro electrónico de los resultados de inspección de todos los canales, lo que permite su posterior interpretación y preparación de un informe completo;
- modo de determinación del tipo de rieles y corrección automática de configuraciones;
- modo de inspección de los agujeros de pernos según las configuraciones especiales;
- para un análisis detallado de las señales detectadas, además de la visualización habitual de información en forma de A-Scan, se usa la exploración tipo B en la escala de tiempo real en uno, dos o cuatro canales (hilos izquierdo y derecho de los canales entrantes y salientes);
- Posibilidad de construir una curva de TCG (de cualquier forma).
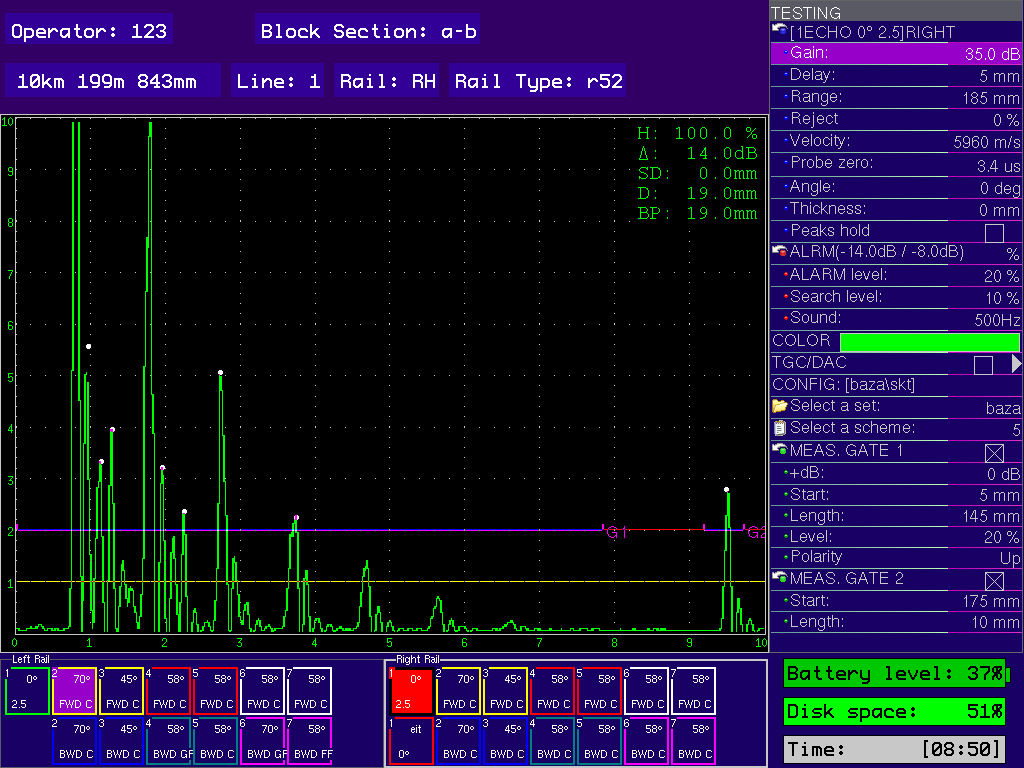
А-scan

B-scan
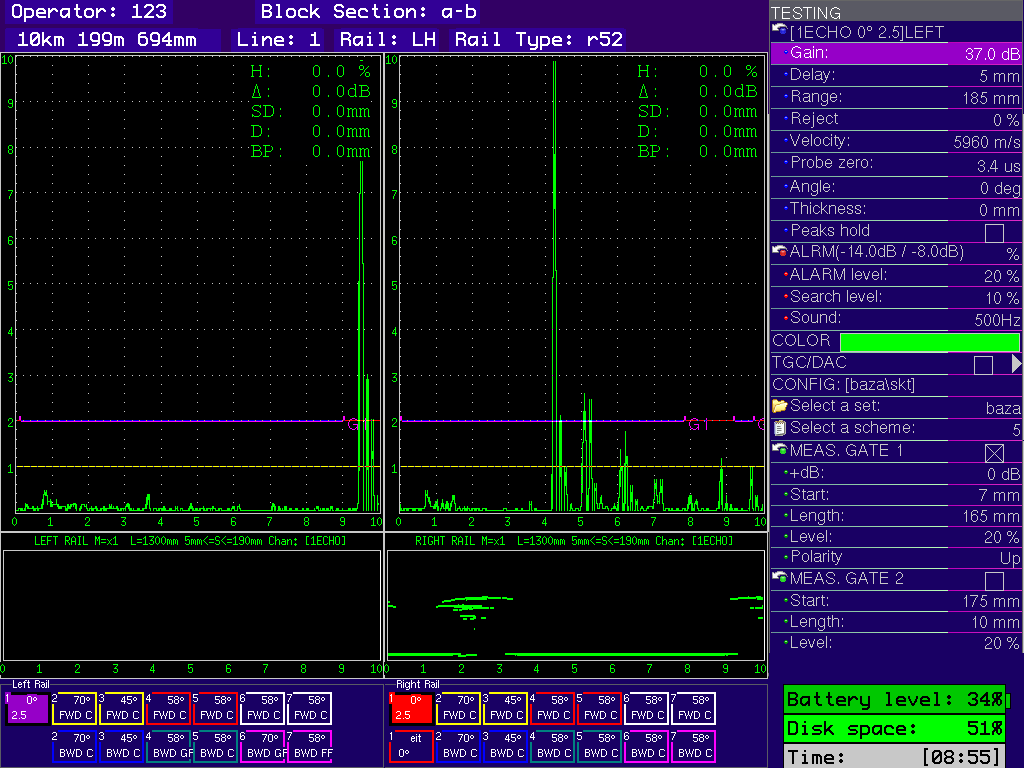
А-scan+B-scan
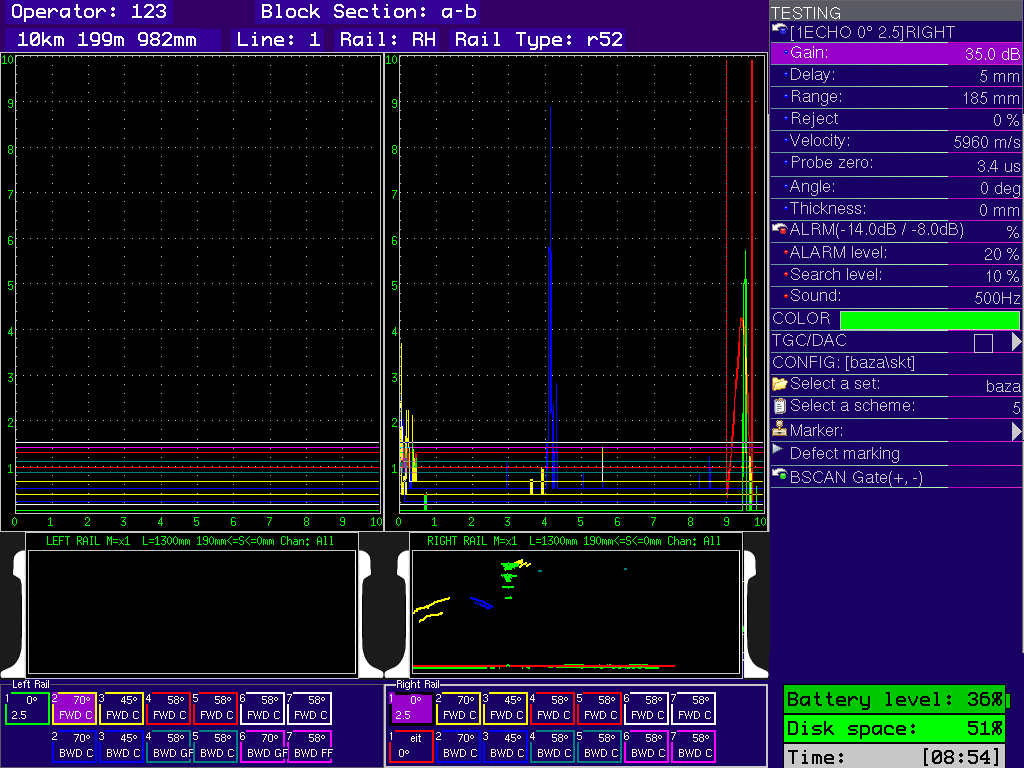
Multi А-scan+ B-scan-All
Fig. Modos de visualización de los resultados de inspección en forma de A-Scan y B-Scan en la pantalla del detector de fallas
Software adicional
El programa «LuCH-Controller 1.6» está destinado para ver y analizar los resultados de inspección del detector de fallas ultrasónico de rieles UDS2-73 y se utiliza para descifrar y proporcionar información sobre las secciones sospechosas de la vía. Este programa permite trabajar con los datos almacenados en un ordenador personal.
Las ventajas principales del uso del programa son:
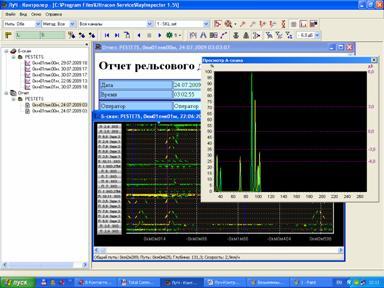
- trabajo cómodo con una base de datos de los sectores de inspección;
- selección de diferente distribución de canales de inspección, hilo controlado, zona de inspección de riel, método de control;
- medición de las dimensiones condicionales de defectos en modo de B-Scan;
- revisión del A-Scan basado en datos guardados en modo de B-Scan;
- revisión de defectosgramas (B-Scan) en el modo de desplazamiento o movimiento rápido a una coordenada dada;
- modo "marcadores de vía" para marcar las secciones sospechosas del riel cuando se visualizan los resultados de inspección;
- un modo de clasificación de los resultados de la inspección por nivel de sensibilidad de menos 6 a más 6 dB con relación al nivel de señalización (ASD);
- modo de revisión e formación de los informes para el área controlada seleccionada.
Características principales:
| Dimensiones exteriores del detector de fallas sin el mango con un bloque ultrasónico y un bloque de alimentación | no más de (1040×1640×1130) mm; en la posición de transporte – no más de (900×2060×600) mm |
|
| Peso del detector de fallas equipado | no más de 50 kg. | |
| Teclado | inglés, ruso. | |
| Lenguas | inglés, ruso. | |
| Cantidad de los bloques ultrasónicos | 4 | |
| Cantidad de los canales ultrasónicos | 28 canales. | |
| Tipo del conector | BNC, RS-19. | |
| Almacenamiento de datos | Lapiz de memoria. | |
| Fuente de alimentación independiente | batería de níquel-metalhidruro con un voltaje nominal de 12 V y una capacidad nominal de 17 Ah. |
|
| Tiempo de funcionamiento | 10 horas. | |
| La potencia eléctrica consumida por el detector de fallas es | no más de 30 V • A. | |
| Tiempo de ajuste del modo de funcionamiento del detector de fallas es | no más de 15 seg. | |
| Resolución de pantalla | 800×480 pixeles. | |
| Dimensiones de la pantalla (ancho, altura, diagonal) | 155 mm, 95 mm, 180 mm (7.5 pulgadas). | |
| Período de garantía | 1 año. | |
| Interfaces | ||
| USB | USB-A (host), USB-B (slave). | |
| Salidas de sincronización O | hay. | |
| Auriculares | hay. | |
| Salida del sensor de vía (encoder) | sensor de vía (encoder) de coordenada única. | |
| Características metrológicas principales | ||
| Los límites del error absoluto básico permitido del detector de fallas al medir la profundidad dН y coordenadas |
|
|
| Los límites del error absoluto básico permitido del detector de fallas al medir las proporciones de las amplitudes de señales ∆N en la entrada del canal de recepción en el rango de amplificación de 20 dB a 80 dB |
∆N = ±(0.2+0.03N); ∆N ─ error absoluto básico al medir las proporciónes de las amplitudes de señales, dB; |
|
| Inestabilidad temporal de la sensibilidad del canal de recepción | ± 0.5 dB para 8 horas del funcionamiento continuo. | |
| Clase de protección durante la operación | IP 64 | |
| Diapasón de temperatura del medio ambiente | de 400°C bajo cero hasta más 500°С. | |
| Presión atmosférica | de 84 a 106,7 kPa. | |
Humedad relativa |
(93 ± 3) a la temperatura 25ºС. | |
| El detector de fallas en el embalaje para el transporte es resistente a la influencia de: |
|
|
| El detector de fallas conserva sus parámetros cuando se expone a las interferencias electromagnéticas que no exceden los siguientes estándares: |
|
|
| La vida media total de un detector de fallas es | de al menos 10 años | |
| La probabilidad de una operación sin fallas es | de al menos 0.9 por 2,000 horas. | |
| Generador de impulsos | ||
| Tipo de impulso de sondeo | Impulso corto de polaridad negativa. | |
| Frecuencia inicial del impulso | Modo monocanal – 250 Hz; modo del funcionamiento continuo: no más de 1000 Hz | |
| Amplitud | 180 V | |
| Duración | 60±10 ns | |
| Duración del porche anterior | no más de 20 ns. | |
| Tipo de sincronización | del impulso inicial, del sensor de vía (encoder). | |
| Receptor | ||
| Amplificación | de 0 a 100 dB con el paso de 0,1; 1; 10 dB. | |
| Señal de entrada | nno más de 2 V (de ráfaga a ráfaga) | |
| Resistencia de entrada del canal de recepción | no más de 300 Ω. | |
| Filtro digital | 1 filtro digital estándar con la frecuencia central 2,5 MHz. | |
| Detector | envolvente. | |
| Modos de ajustes | ||
| Mediciones | mm | |
| Diapasón de inspección | De 0 hasta 1000 mm, con el paso de 1, 10, 100 mm. | |
| Velocidad | De 2000 m/s hasta 8000 m/s, con el paso de 1, 10, 100, 1000 m/s. | |
| Retardación en el prisma | de 0 hasta 60 μs, con el paso de 0,1; 1 μs. | |
| Diapasón de retardación | De 0 hasta 1000 μs, con el paso de 1, 10, 100 μs. | |
| Ángulo de entrada | de 0 hasta 90°, con el paso de 1°, 10° | |
| Tiempos/ventanas | ||
| Cantidad de tiempos | Cantidad máxima de tiempos 16. | |
| Duración del tiempo | 0.01 - 0.4 ms. | |
| Cantidad de ventanas en el tiempo | Cantidad máxima de ventanas 2 por cada canal. | |
| Nivel de fijación de la ventana | De 0 % hasta 100 % de la escala vertical de la pantalla | |
| ALARM | When the signal goes beyond the ALARM level, when the signal stays within the ALARM level. | |
| Sistema de TCG | ||
| Sistema del TCG acústico | acústico: separado para cada hilo de carril y combinado (para un grupo de canales); el diapasón de ajuste de la frecuencia de los impulsos del indicador acústico del sistema de alarma es de 0.5 a 5 kHz, con la discreción de ajuste 100 Hz |
|
| TCG de luz | luminoso – separado para cada hilo de carril y combinado (por todos los canales de sondeo); visual por la pantalla – separado para cada hilo de carril y cada canal. |
|
| Mediciones en el modo А-Scan | ||
| Parámetros representados | 4 parámetros de medición se representan en la línea de información. | |
|
||
Curva TCG |
La cantidad máxima de puntos por tiempo – 14, el diapasón dinámico 100 dB, el paso de ajuste verticalmente 1 dB, horizontalmente 2 mm |
|
| Mediciones en el modo B-Scan | ||
| B-Scan “Crudo” |
|
|



